制造商(shāng)(A-Z)
産(chǎn)品分(fēn)類
能(néng)源技(jì )術應用(yòng)
汽車(chē)電(diàn)子應用(yòng)
更多(duō)應用(yòng)
公(gōng)司新(xīn)聞
技(jì )術熱點
市場活動
公(gōng)司簡介
榮譽資質(zhì)
招聘信息
聯系方式
制造商(shāng)(A-Z)>
産(chǎn)品分(fēn)類>
能(néng)源技(jì )術應用(yòng)>
汽車(chē)電(diàn)子應用(yòng)>
更多(duō)應用(yòng)>
公(gōng)司新(xīn)聞>
技(jì )術熱點>
市場活動>
公(gōng)司簡介>
榮譽資質(zhì)>
招聘信息>
聯系方式>
掃地機除了吸塵這一傳統的清潔功能(néng)以外,特點在于智能(néng),即能(néng)夠實現自主清掃,移動導航是實現真正全自主移動機器人的關鍵,體(tǐ)現在定位和地圖構建上及路徑規劃的精(jīng)準度上。
早期掃地機器人采用(yòng)随機清掃路徑,通過陀螺儀對物(wù)品進行定位,經常出現反複清掃或大面積漏掃的情況,清掃效率較低。2019年開始,随着導航系統和路徑規劃等技(jì )術的不斷創新(xīn),掃地機器人的智能(néng)化程度和清潔效果得到了顯著的提升。
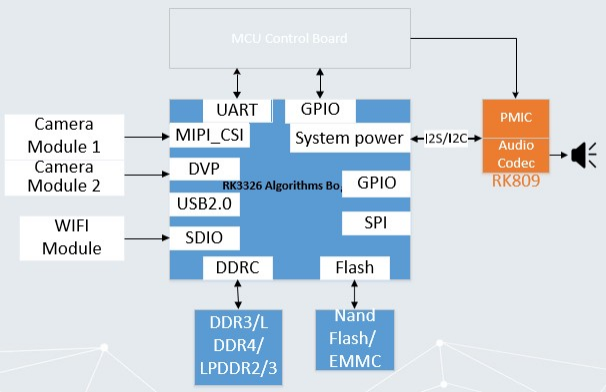
前規劃式産(chǎn)品主要引入SLAM 算法(即時定位與地圖構建或并發建圖與定位),根據傳感器不同,可(kě)主要分(fēn)為(wèi)激光導航類(以激光雷達為(wèi)傳導器)和視覺導航類(以攝像頭為(wèi)傳導器)。激光和視覺導航已成為(wèi)主流配置,線(xiàn)上市場中(zhōng)單配置的激光類/視覺類掃地機器人零售額份額分(fēn)别達到44.8%和15.7%。
深圳市科(kē)通技(jì )術股份有(yǒu)限公(gōng)司 客服電(diàn)話:(+86)755-26018083 郵箱:cs@comtech.cn
© Copyright 2018 www.comtech.cn | 京ICP證000000号 | 粵公(gōng)網安(ān)備 44030502003347号





 粵公(gōng)網安(ān)備 44030502003347号
粵公(gōng)網安(ān)備 44030502003347号



